Detecting Rest Stops in GPS Track Data
Problem Statement
Develop an algorithm that automatically classifies GPS track points as either "moving" or "stationary".Nomenclature
$\tau_{i},i=0,\ldots,n$ List of time stamps in a GPS track.$\boldsymbol{x}_{i},i=0,\ldots,n$ List of global position measurements corresponding to the time stamps $\tau_{i}$.
$T_{i}=\tau_{i}-\tau_{i-1},i=1,\ldots,n$ Time interval between successive measurements.
$S_{i}=d\left(\boldsymbol{x}_{i},\boldsymbol{x}_{i-1}\right),i=1,\ldots,n$ Distance between successive measurements.
$M_{i},i=1,\ldots,n$ Indicator of motion state of device in period before observation i. $M_{i}=1$ indicates device was moving. If $M_{i}=0$, it was stationary.
$\sigma_{\varepsilon}^{2}$ Device position measurement error variance, each dimension, m2.
$\bar{v}$ Mean speed of device when moving, (m/sec).
$\sigma_{v}^{2}$ Variance of device speed when moving, (m/sec)2.
$\mu_{0},\sigma_{0}^{2}$ Truncated normal distribution mean and variance parameters for time interval between measurements when device is at rest.
$\mu_{1},\sigma_{1}^{2}$ Truncated normal distribution mean and parameters for time interval between measurements when device is moving.
Summary
|
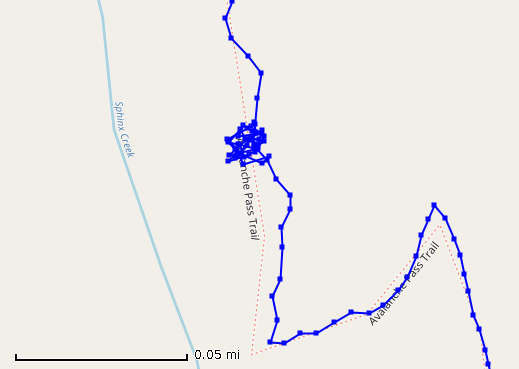
The picture at the right plots part of a track from one of my trips. Guess where the rest stop occurred! A cluster of
track points forms around the point where we stopped. The track points vary from point to point due to GPS measurement
error. |
|
Details of this project, including equations and Python scripts are in Likelihood function for GPS movement data (normal inter-measurement time distributions) and Convolution of a non-central chi-square with a central chi-square distribution. These documents are exports of the Jupyter notebooks that made the calculations.
A GPS track consists of time-stamped positions $\left(\tau_{i},\boldsymbol{x}_{i}\right),i=0,\ldots,n$. If we take successive differences on the times and positions, $T_{i}=\tau_{i}-\tau_{i-1}, S_{i}=d\left(\boldsymbol{x}_{i},\boldsymbol{x}_{i-1}\right)$, then we have series that can detect motion and even estimate speed. ($d\left(\boldsymbol{x},\boldsymbol{y}\right)$ is a function that computes the great circle distance between any to points on the Earth's surface.) When the device is moving, $S_{i}$ is the sum of the true distance moved during the time interval $T_{i}$ and the difference of two position measurement errors. When the device is stationary, $S_{i}$ contains only the difference in measurement errors and no movement distance.
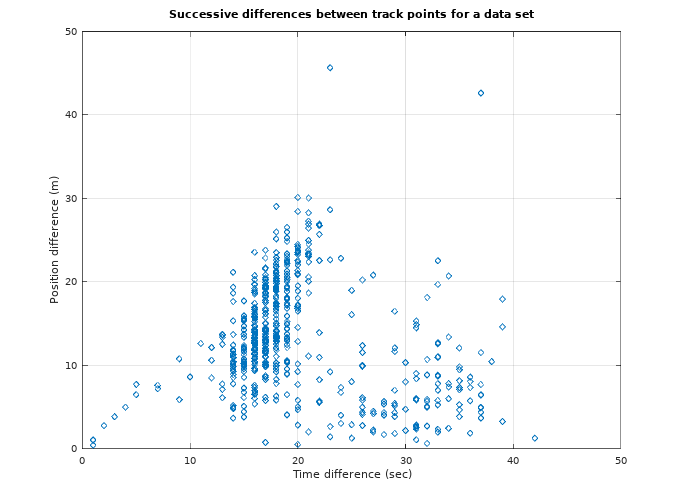
| The plot at right is a scatter diagram of one data set of successive differences from a backpack trip near Mount Brewer, CA. The device was a Garmin eTrex. We see that the eTrex sample interval varied from 1 to 42 seconds, but was typically every 15 seconds. We can see two modes in the scatter diagram. One is centered at 18 seconds and 15 meters between measurements. |
|
For our purposes, a statistical model should describe two states: stationary and moving. It should describe the sources of errors in the observations $T_{i}, S_{i}$ in each state. Details of the model derivation are in the modeling paper. Here, I just summarize the model assumptions, the log-likelihood function and numerical results. The model assumptions are:
- The device is either in a “stationary” or a “moving” state.
- While in the stationary state, $S_{i}^{2}$ is entirely from GPS measurement error.
- While in a the moving state, $S_{i}^{2}$ is the sum of GPS measurement error and a component from the movement speed.
- Movement speed varies from measurement to measurement according to a normal distribution about a mean speed.
- GPS measurement error has a two-dimensional Gaussian distribution with mean zero and variance $\sigma_{\varepsilon}^{2}$ in each dimension.
- Regardless of the moving state of the device, the time interval between measurements varies as a normal distribution.
- The mean of the time interval between measurements for the stationary state is greater than then mean for the moving device.
- The variance of the time interval between measurements for the stationary state is no greater than the variance for the moving device.
The derived formula for the log-likelihood function of the observations $T_{i}, S_{i}$ is:
$$L\left(\left\{ \left(T_{i},S_{i}^{2}\right)\right\} _{i=1}^{n}|\left\{ M_{i}\right\} _{i=1}^{n},\bar{v},\sigma_{v},\sigma_{\varepsilon}^{2}\right)$$ $$=\sum_{i=1}^{n}(1-M_{i})\left(-\log\left(1-\Phi\left(-\frac{\mu_{0}}{\sigma_{0}}\right)\right)-\frac{1}{2}\log\left(2\pi\sigma_{0}^{2}\right)-\frac{\left(T_{i}-\mu_{0}\right)^{2}}{2\sigma_{0}^{2}}-\log\left(2\sigma_{\varepsilon}^{2}\right)-\frac{S_{i}^{2}}{2\sigma_{\varepsilon}^{2}}\right)$$ $$+M_{i}\left(-\log\left(1-\Phi\left(-\frac{\mu_{1}}{\sigma_{1}}\right)\right)-\frac{1}{2}\log\left(2\pi\sigma_{1}^{2}\right)-\frac{\left(T_{i}-\mu_{1}\right)^{2}}{2\sigma_{1}^{2}}+\log\left(f_{M=1}\left(S_{i}^{2}|T_{i}\bar{v},T_{i}^{2}\sigma_{v}^{2},\sigma_{\varepsilon}^{2}\right)\right)\right)$$
where $f_{M=1}\left(S_{i}^{2}|T_{i}\bar{v},T_{i}^{2}\sigma_{v}^{2},\sigma_{\varepsilon}^{2}\right)$ is the density function of $S_{i}^{2}$ when the device is moving, the expression of which is a convolution:
$$f_{M=1}\left(S_{i}^{2}|T_{i}\bar{v},T_{i}^{2}\sigma_{v}^{2},\sigma_{\varepsilon}^{2}\right)=\frac{1}{2T_{i}^{2}\sigma_{v}^{2}\sigma_{\varepsilon}^{2}2^{\frac{1}{2}}\Gamma\left(\frac{1}{2}\right)}\int_{0}^{S_{i}^{2}}\left(\frac{S_{i}^{2}-y}{T_{i}^{2}\bar{v}^{2}}\right)^{-\frac{1}{4}}\left(\frac{y}{\sigma_{\varepsilon}^{2}}\right)^{-\frac{1}{2}}\exp\left(-\frac{1}{2}\left(\frac{S_{i}^{2}-y}{T_{i}^{2}\sigma_{v}^{2}}+\frac{\bar{v}^{2}}{\sigma_{v}^{2}}+\frac{y}{\sigma_{\varepsilon}^{2}}\right)\right)I_{-\frac{1}{2}}\left(\frac{\bar{v}}{T_{i}\sigma_{v}^{2}}\sqrt{S_{i}^{2}-y}\right)dy$$
The script $\textsf{f_non_central_convolved}$ (see Convolution of a non-central chi-square with a central chi-square distribution) evaluates $f_{M=1}\left(S_{i}^{2}|T_{i}\bar{v},T_{i}^{2}\sigma_{v}^{2},\sigma_{\varepsilon}^{2}\right)$ by numerical integration. The script $\textsf{f_llmovement}$ (see Likelihood function for GPS movement data (normal inter-measurement time distributions)) evaluates the log-likelihood function. Cell $\textsf{In [9]}$ under the heading Maximum Likelihood Estimation is a script that finds the maximum likelihood estimates for the unknown parameters.
| For our example track, the maximum likelihood estimate of the classifiers $\hat{M}_{i},i=1,\ldots,n$ are shown in this
scatter diagram. The value of $\hat{M}_{i}$ for each pair $(T_{i}, S_{i})$ is coded by color. The MLEs of the other parameters are: |
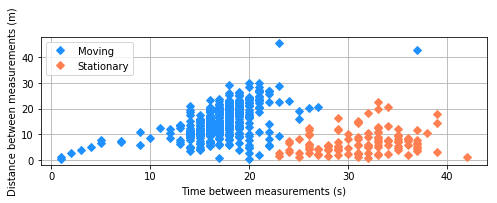 |
$\hat{\bar{v}} = 0.831$ m/sec
$\hat{\sigma}_{v}^{2} = 0.122$ (m/sec)2 ($\hat{\sigma}_{v} = 0.349$ m/sec)
$\hat{\mu}_{0} = 31.0$ sec
$\hat{\sigma}_{0}^{2} = 11.7$ sec2 ($\hat{\sigma}_{0} = 3.42$ sec)
$\hat{\mu}_{1} = 17.1$ sec
$\hat{\sigma}_{1}^{2} = 11.7$ sec2 ($\hat{\sigma}_{1} = 3.42$ sec)
The MLE algorithm behaved as expected. It classified those pairs with small distance intervals and long time intervals as rest stops, leaving the remaining pairs to form a reasonable regression of distance versus time. The mean speed of 0.831 m/sec (1.9 miles/hour) is consistent with my hiking speed from other trips. The variability of hiking speed, 0.349 m/sec or about 42% of the mean hiking speed is typical of varying conditions of this hike; the track includes level travel as well as climbing switchbacks. The GPS error of 5.25 m in each direction is about what I expect.
| As a final check, we can plot the positions of the points that were classified as rest stops over a plot of the track. This plot appears at the right. I remember that the longest stops on that hiking day were at the trailhead near (100, -200) on the graph, at the bridge crossing of the South Fork near (2800, -800), and close to the Sphinx Trail junction near (3800, -1800). | 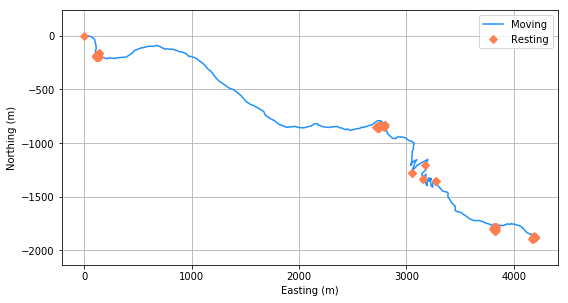 |
Read the Details
- Likelihood function for GPS movement data, normal inter-measurement times
- Paper, model and likelihood function derivation for GPS movement detection.
- Note: Convolution of a non-central chi-square with a central chi-square distribution
- Paper, derivation of convolution integral for the probability density of the sum of a non-central chi-square and central chi-square variable
- Likelihood function for GPS movement data (normal inter-measurement time distributions)
- Export of Jupyter Notebook, tools for computing and plotting maximum likelihood estimators for GPS movement detection.
- Convolution of a non-central chi-square with a central chi-square distribution
- Export of Jupyter Notebook, code and tests for numerical integration of the non-central and central chi-square convolution integral