Monotonic Response Surface Estimation by Constrained Coefficients
Proceedings of the 2015 Winter Simulation Conference
AbstractClassic first and second-order response surface models (RSM) do not automatically observe monotonicity, while in many real problems, the researcher knows the response to be monotonic in some variables. This paper provides the constraints on coefficients that ensure monotonicity and offers some approaches for estimating monotonically constrained response surfaces.
I start with a very simple example of non-monotonic results arising from sampling error combined with a lean design of experiments. I develop the theory for linear regressions of quadratic response surface representations, and then extend it to generalized linear models (GLMs), kriging and Bayes frameworks.
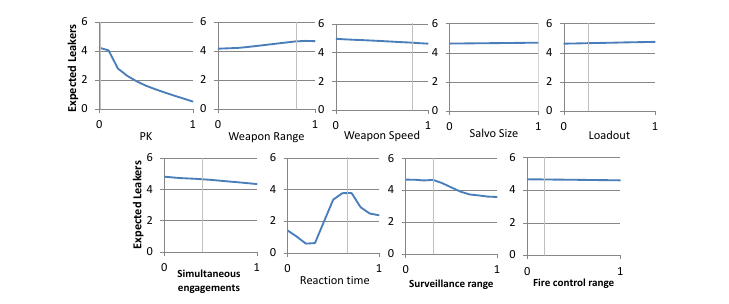
The following set of charts contains profiles of a stochastic kriging response surface for a simulation of a system of systems (SoS) providing an active defense of a high-value site against a cruise missile attack. Of particular interest is the incorrect non-monotonic response to system reaction time. Likewise, the weapon range response is counter-intuitive. Leakers (the number of attackers that got through) should increase with increasing reaction time and decrease with increasing weapon range. The non-monotonic trends exhibited here are the result of sampling error and an unconstrained model space.
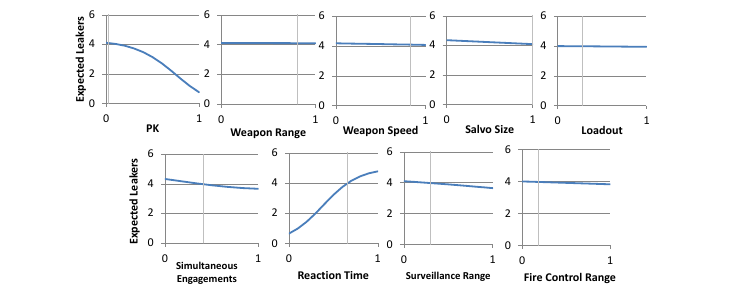
On the other hand, a monotonically constrained Bayes GLM, solved using a Markov Chain Monte Carlo algorithm, resulted in the following response surface profiles. Not only are the trends in line with system behavior, but the monotonically constrained surface showed better predictive capability than the unconstrained when evaluated by cross-validation.
Read more about the research in the paper.